Οι βηματικοί κινητήρες – stepper motor είναι κινητήρες DC που κινούνται σε διακριτά βήματα. Πρόκειται δηλαδή για έναν κινητήρα επαγωγής, ο οποίος είναι σταδιακών βημάτων.
Κάθε φορά πραγματοποιείται μόνο ένα βήμα, για να πραγματοποιηθεί αυτό το βήμα θα πρέπει ο κινητήρας να περιστραφεί. Οι κινητήρες DC αποτελούνται από πολλά πηνία τα οποίο οργανώνονται σε ομάδες και ονομάζονται «φάσεις». Για να περιστραφεί ο κινητήρας θα πρέπει να ενεργοποιηθούν οι φάσεις σε σειρά. Αν η διαδικασία ελέγχεται από έναν ηλεκτρονικό υπολογιστή μπορεί να επιτευχθεί ακριβή ρύθμιση θέσης και ταχύτητας.
Οι βηματικοί κινητήρες έχουν ως πλεονέκτημα την ακρίβεια τους και για αυτόν τον λόγο χρησιμοποιούνται σε πολλές εφαρμογές ακρίβειας, το χαρακτηριστικό τους είναι ότι κινείται σε διακριτές θέσεις και όχι ανεξέλεγκτα. Η ποιότητά τους ως προς την ακρίβεια μετριέται σε βήματα. Οι ηματικοί κινητήρες παράγονται σε διάφορα μεγέθη, στυλ και ηλεκτρικά χαρακτηριστικά.
Ένας βηματικός κινητήρας μπορεί να είναι 500 βημάτων ή 100 βημάτων. Ο βηματικός κινητήρας 500 βημάτων είναι πιο ακριβής. Επισημάνουμε ότι όταν ανφερόμαστε σε βήματα εννοούμε πόσες κινήσεις εκτελεί ο ρότορας για μια πλήρη περιστροφή. Οι κινήσεις δίδονται με ηλεκτρικούς παλμούς
Εκτός των ανωτέρω θετικών στοιχείων αυτά που τους χαρακτηρίζουν είναι:
Θέση (Positioning):
η δυνατότητα να κινούνται με ακρίβεια με επαναλαμβανόμενα βήματα τους κάνουν να υπερέχουν σε εφαρμογές που απαιτούν ακριβή κίνηση, όπως CNC πλατφόρμες, κινούμενες κάμερες σε διευθύνσεις Χ και Υ, 3D εκτυπωτές και plotters.
Έλεγχος ταχύτητας (speed control):
Λόγω της ακρίβειας στα βήματα κίνησης, δίνεται η δυνατότητα ελέγχου της ταχύτητας περιστροφής για την αυτοματοποίηση της διαδικασίας και της ρομποτικής.
Ροπή χαμηλής ταχύτητας (Low speed torque):
Οι βηματικοί κινητήρες έχουν μέγιστη ροπή σε χαμηλές ταχύτητες, έτσι είναι κατάλληλοι για εφαρμογές που απαιτούν χαμηλή ταχύτητα και μεγάλη ακρίβεια. Να επισημανθεί ότι οι κινητήρες DC δεν έχουν μεγάλη ροπή σε χαμηλές ταχύτητες.
Υπάρχουν και κάποιοι περιορισμοί οι οποίοι αναλυτικότερα είναι:
Χαμηλή απόδοση (low efficiency):
Οι βηματικοί κινητήρες τραβούν ρεύμα και κατά την διάρκεια που δεν δουλεύουν με συνέπεια να ζεσταίνονται. Επομένως η κατανάλωση ρεύματος για τους βηματικούς κινητήρες είναι ανεξάρτητη από το φορτίο.
Περιορισμένη ροπή σε υψηλής ταχύτητας (limited high speed torque):
Οι βηματικοί κινητήρες έχουν μικρότερη ροπή σε υψηλές ταχύτητες σε σχέση με τις χαμηλές ταχύτητες. Πολλοί βηματικοί κινητήρες χρειάζονται να συνδυαστούν με κατάλληλο οδηγό για να επιτύχουν καλύτερη απόδοση υψηλής ταχύτητα.
Έλλειψη ανάδρασης (nofeedback):
Τα βηματικά μοτέρ δεν έχουν ανατροφοδότηση για την θέση. Για να επιτευχθεί μεγάλη ταχύτητα θα πρέπει να γίνει με λειτουργία «ανοιχτού βρόχου». Να σημειωθεί ότι περισσότεροι διακόπτες (limit switches) τυπικά απαιτούνται για την ασφάλεια ή την δημιουργία μιας θέσης αναφοράς.
Είδη βηματικών κινητήρων
Οι βηματικοί κινητήρες χωρίζονται βάσει της κατασκευής του δρομέα επομένως μπορούμε να τους διαχωρίσουμε ως εξής:
- Βηματικός κινητήρας μόνιμου μαγνήτη
- Βηματικός κινητήρας μεταβλητής μαγνητικής αντίδρασης
- Υβριδικός βηματικός κινητήρας
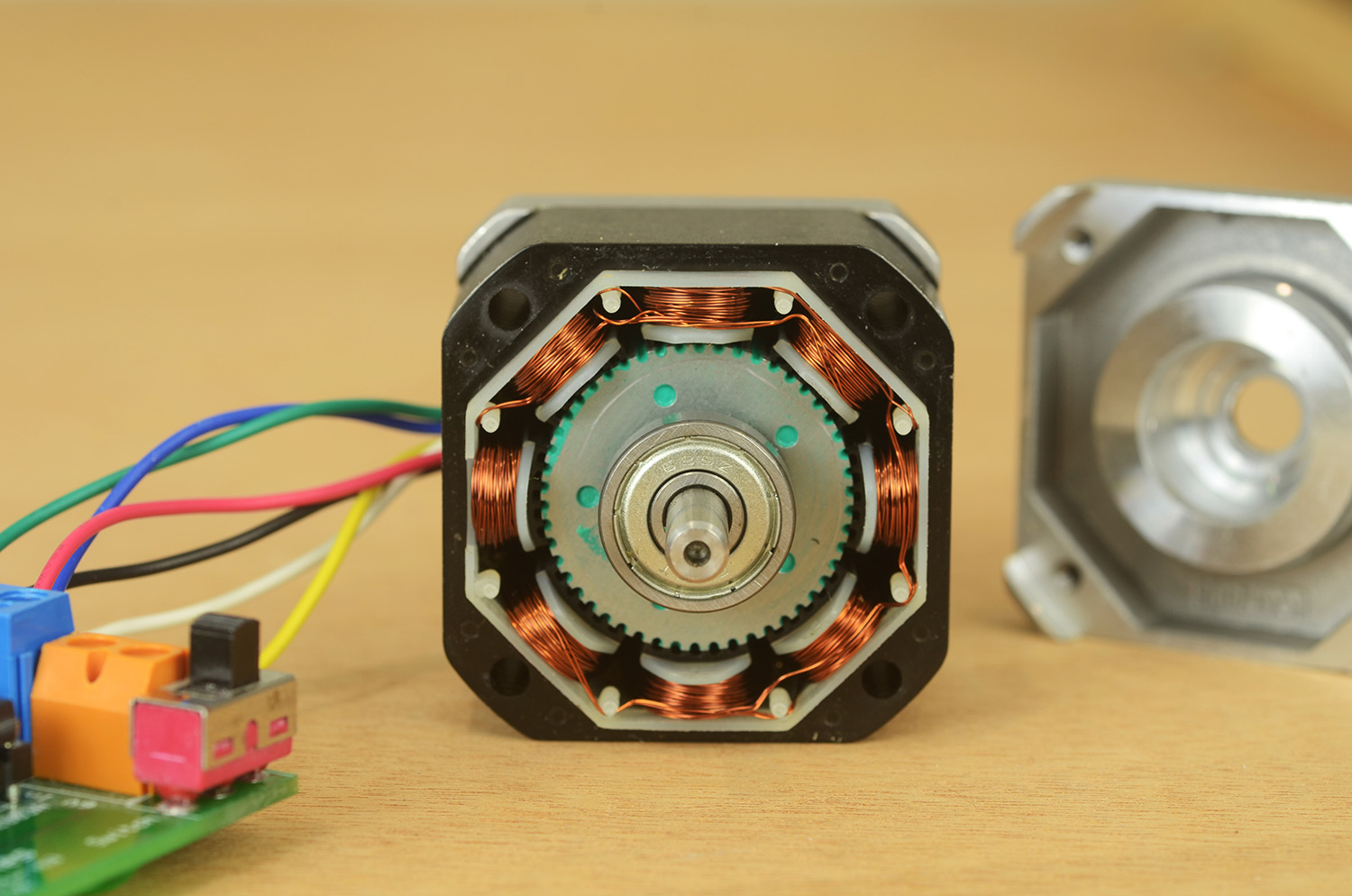
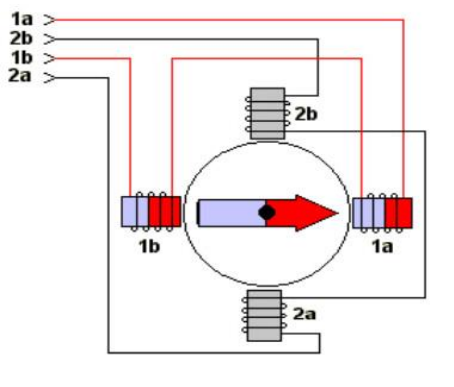
Εσωτερικό Βηματικού Κινητήρα
Όπως παρατηρείται στο παρακάτω σχήμα ο πυρήνας των πόλων περιελίσσεται από τυλίγματα τα οποία φέρει ο στάτης του κινητήρα. Τα τυλίγματα είναι σε ζεύγη και σε σειρά με τέτοιο τρόπο, ώστε το ένα να δρα ως θετικός πόλος και το άλλο ως αρνητικός πόλος. Δύο (2) τυλίγματα σε σειρά λειτουργούν ως θετικοί (+) και αρνητικοί (-) πόλοι. Ο αριθμός των τυλιγμάτων παίζει καθοριστικό ρόλο για την γωνία του βήματος
Χρήση βηματικού κινητήρα
Όπως προαναφέραμε η χρήση των βηματικών κινητήρων γίνεται σε εφαρμογές που έχουν απαιτήσεις στην ακρίβεια. Οι βηματικοί κινητήρες μπορεί να χρησιμοποιηθούν ενδεικτικά στις εξής εφαρμογές
- Ρομπότ
- Ρομποτικά συστήματα
- CNC
- Χρονοδιακόπτες
- Εκτυπωτές / scanner/ fax
- Δορυφόροι
- Διαστημικά οχήματα
- Κάμερες με μηχανικό zoom
- Μονάδες ανάγνωσης οπτικών δίσκων
- Ρολόγια
Λειτουργία βηματικού κινητήρα με ½ βήματος
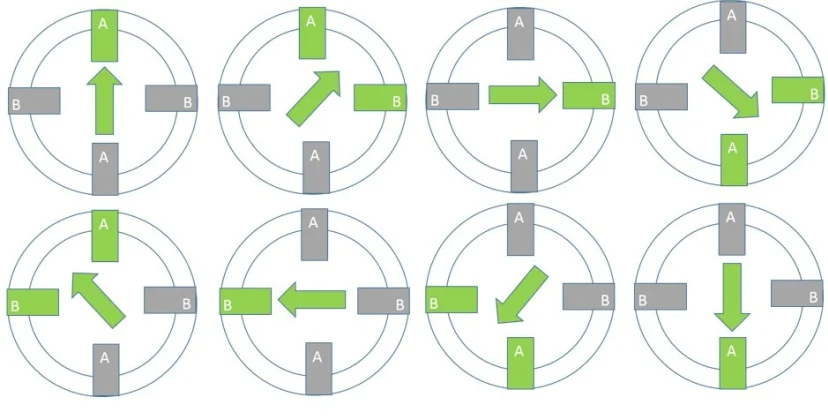
Οι βηματικοί κινητήρες έχουν την δυνατότητα μετατροπής ενός ψηφιακού παλμού σε μηχανική κίνηση. Για να περιστραφεί ο κινητήρας κατά ένα βήμα αρκεί να στείλει ένα παλμό στα δύο άκρα, δηλαδή στον θετικό (+) και αρνητικό (-) πόλο. Η περιστροφή αυτή γίνεται κατά μια συγκεκριμένη ελάχιστη γωνία. Για μεγαλύτερη ακρίβεια θα μπορούσε να γίνεται ένας ενδιάμεσος βηματισμός του κινητήρα, αυτό για να επιτευχθεί θα πρέπει να ακολουθηθεί η παρακάτω διαδικασία. Θα πρέπει να πραγματοποιηθούν τα συγκεκριμένα βήματα σε μια διάταξη.
Αναλυτικότερα για να πραγματοποιηθεί ένα βήμα θα ενεργοποιήσουμε διαδοχικά τα Α (+,-) και Β (+,-). Για να ενεργοποιήσουμε μισό βήμα θα ενεργοποιήσουμε διαδοχικά +Α,+Α+Β,+Β, +Β-Α, -Α, -Α-Β,-Β,-Β+Α.
Το κύκλωμα του βηματικού κινητήρα
Οι βηματικοί κινητήρες χρειάζονται μια εξωτερική τροφοδοσία αντίστοιχων volt, αυτή η τροφοδοσία μπορεί να γίνει είτε από μπαταρία είτε από τροφοδοτικό. Ο πυκνωτής δύναται να μην χρησιμοποιηθεί.